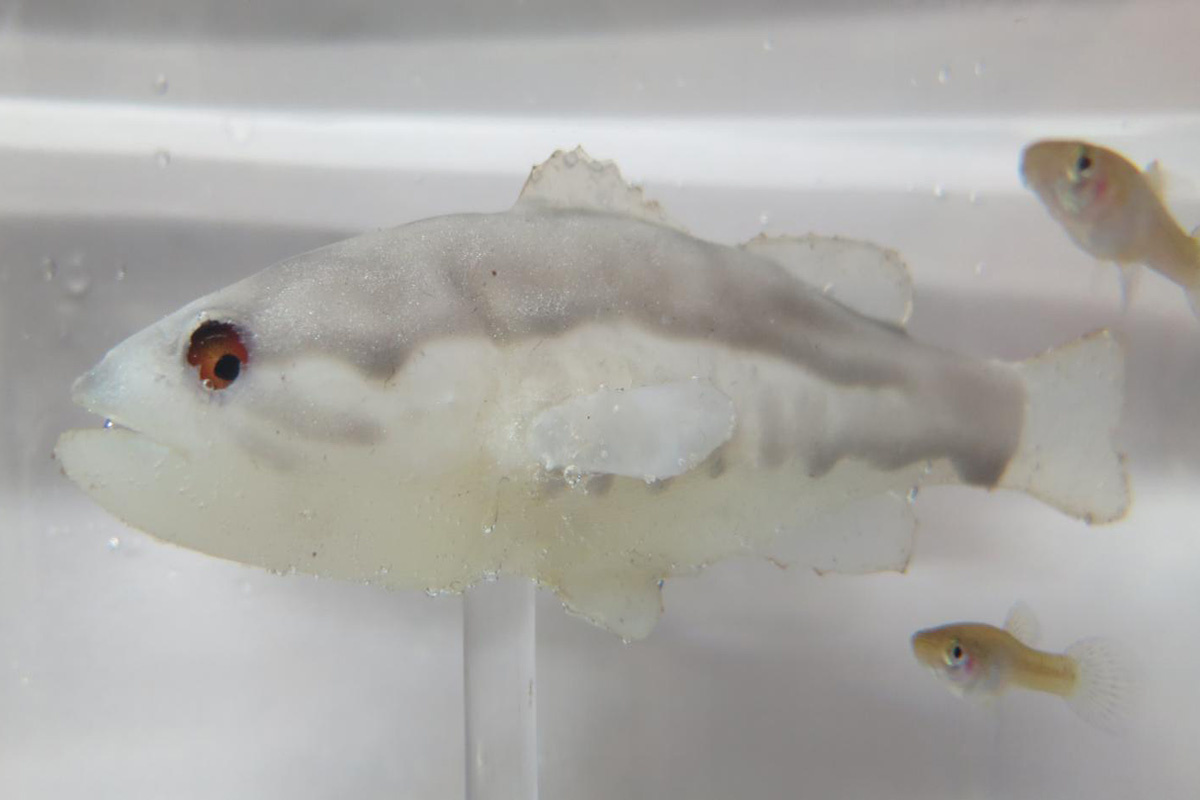
Cá robot có hình dáng giống cá thật.
Phát triển cá robot chống lại loài cá gây hại trên toàn cầu
Cá ăn muỗi hay cá muỗi (mosquitofish) là loài xâm lấn gây hại, chuyên giành thức ăn của các loại cá và động vật thủy sinh khác.
Khi được đưa vào môi trường mới, cá muỗi sẽ tiếp cận và gặm phần đuôi của những con cá, nòng nọc,… bản địa. Mất đuôi, chúng sẽ không thể bơi để tiếp cận nguồn thức ăn chính – ấu trùng muỗi, và chết đói. Ngoài ra, trứng của chúng cũng có nguy cơ bị cá muỗi ăn mất.
Điều không may là các phương án bắt cá muỗi thủ công lại tốn rất nhiều công sức và kém hiệu quả. Vì thế, một nhóm nghiên cứu với những thành viên đến từ Đại học Tây Úc, ĐH New York (Mỹ) và ĐH Padova (Ý) đã tìm đến một loài thiên địch của chúng: cá vược miệng lớn (largemouth bass). Tuy nhiên, việc thả cá vược thật vào môi trường ao, hồ có nguy cơ làm đảo lộn sự cân bằng của hệ sinh thái tại đó, cho nên phải cần tới một phiên bản robot.

Cá ăn muỗi hay cá muỗi (mosquitofish) là loài xâm lấn gây hại.
Để kiểm chứng tính khả thi của ý tưởng này, các nhà khoa học đã chế tạo một mô hình cá vược bằng cao su trông hệt như thật – được gắn vào một trục [trong suốt] thẳng đứng với nam châm ở đáy. Sau đó, họ đặt mô hình vào trong bể đầy nước, bên dưới bố trí một thiết bị nam châm nữa có khả năng tương tác với cục nam châm kia. Nhờ sử dụng một động cơ bước từ tính (stepper motor) và dụng cụ trông khá giống máy vẽ đồ thị (plotter) để di chuyển nam châm bên dưới bể, nhóm có thể tùy ý điều hướng robot?

Sơ đồ mô hình thí nghiệm.
Tiếp theo, hai nhóm (nhóm can thiệp và nhóm đối chứng), mỗi nhóm bao gồm 06 cá thể cá muỗi hoang dã và 06 cá thể nòng nọc của loài ếch Litoria moorei (được bắt từ tự nhiên ở Úc), lại được thả vào bể để theo dõi trong vòng một giờ bằng camera chuyên dụng gắn trên cao. Mỗi khi quan sát thấy một cá thể cá muỗi có động thái lại gần nòng nọc, robot sẽ được kích hoạt để di chuyển về khu vực đó. Sau 5 tuần thử nghiệm, các nhà nghiên cứu nhận thấy: những con cá muỗi bị cá vược robot xua đuổi liên tục dần trở nên dè dặt hơn trong việc tiếp cận nòng nọc so với nhóm đối chứng (không bị can thiệp). Hiệu ứng này vẫn tồn tại ngay cả khi robot không còn hiện diện nữa. Chưa hết, những con cá muỗi chịu cảnh rượt đuổi còn có biểu hiện căng thẳng, sụt cân, suy giảm chức năng sinh sản và khó sóng sốt hơn trong môi trường mới.
Ngược lại, nòng nọc có thị giác kém xa cá muỗi, cho nên chúng không mấy để ý tới sự chuyển động của robot. Trên thực tế, khi không bị lũ cá muỗi làm phiền nữa, nòng nọc còn có xu hướng bơi ra xa hơn để kiếm thức ăn và tăng cường triển vọng sống sót.
Mặc dù mô hình trên vẫn chưa thể được áp dụng cho các vùng nước trong tự nhiên, nhưng Tiến sỹ Giovanni Polverino từ Đại học Tây Úc – tác giả đứng đầu nghiên cứu – nhận định: “Những loài xâm lấn luôn là vấn đề lớn trên khắp thế giới và là nguyên nhân hàng đầu gây tổn thất đa dạng sinh học. Chúng tôi rất kỳ vọng hướng tiếp cận của mình – sử dụng robot để khai thác điểm yếu của các loài địch hại – sẽ mở cánh cửa cho hoạt động kiểm soát nguy cơ này hiệu quả hơn trong tương lai”.
Kết quả nghiên cứu đã được công bố trên tạp chí iScience.
Nguồn: Cell Press, EurekAlert
_1769663223.jpg)

_1769399561.jpg)
_1762138517.jpg)