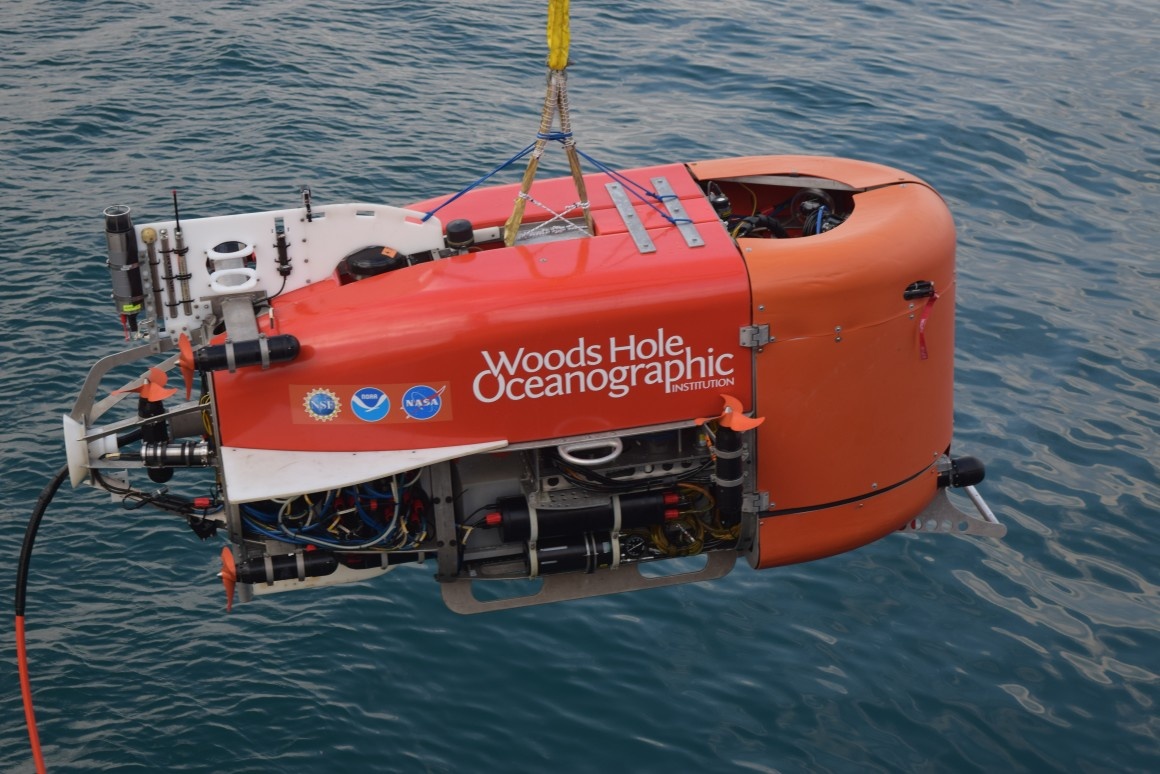
Chiếc NUI đang được hạ thủy để lặn xuống đáy biển Aegean Sea ở độ sâu dưới 500 m trong nhiệm vụ thăm dò núi lửa Kolumbo. Ảnh: Evan Lubofsky/Viện Hải dương học Woods Hole.
Robot tự thu thập mẫu địa chất dưới đáy biển
Hệ thống ROV có khả năng tự thu thập mẫu vật dưới đáy biển mà không cần đến sự can thiệp của con người.
Không thể phủ nhận sự hữu dụng của các thiết bị ROV (phương tiện hoạt động dưới nước ở khoảng cách xa), tuy nhiên việc điều khiển chúng bằng tay cầm (console) gắn cần gạt (joystick) lại là một nhiệm vụ chẳng mấy dễ dàng.
Đó cũng là lý do khiến các nhà khoa học không ngừng nỗ lực phát triển những hệ thống ROV có khả năng tự thu thập mẫu vật dưới đáy biển mà không cần đến sự can thiệp của con người.
Một nhóm nghiên cứu tại Viện Hải dương học Woods Hole (WHOI), tiểu bang Massachusetts (Hoa Kỳ), do TS. Rich Camilli dẫn đầu, vừa hoàn thiện một phần mềm tự hoạch định (automated planning software) dựa trên trí tuệ nhân tạo (AI), được thiết kế để có thể làm việc với các ROV.
Công nghệ này đã được trang bị trên chiếc ROV mang tên Neried Under Ice (NUI) của WHOI, dùng cho nhiệm vụ thăm dò, khám phá núi lửa Kolumbo dưới đáy biển ngoài khơi đảo Santorini (Hy Lạp). Nhờ vào sức mạnh của AI, chiếc ROV sẽ quyết định nên viếng thăm khu vực nào và sau đó tự thu thập mẫu địa chất.
Đây có thể được xem là hệ thống robot thu thập mẫu địa chất dưới đáy biển đầu tiên trên thế giới. Gideon Billings, sinh viên cao học đến từ Đại học Michigan (Mỹ), người viết một phần mã nguồn của hệ thống, đã thử nghiệm ra một mệnh lệnh từ xa cho NUI. Thiết bị sau đó đã nhanh chóng phản hồi bằng các thao tác thuần thục của một cánh tay robot – có khả năng tự vươn dài để xúc lấy những khối trầm tích tại một địa điểm cụ thể nào đó. Thường thì nhiệm vụ theo kiểu như vậy sẽ cần đến người điều khiển.
“Đó quả là một bước tiến lớn đối với các ROV thu thập mẫu địa chất,” Camilli nhận định. “Chúng tôi luôn muốn không phải cần đến joystick nữa, và mọi thứ đang tiến triển hết sức thuận lợi.”
Hệ thống trên được phát triển trong khuôn khổ chương trình PSTAR (khám phá hành tinh dựa vào các thành tựu nghiên cứu trong lĩnh vực analog) của NASA, theo kỳ vọng, sẽ giúp nhân loại thực hiện các chuyến thám hiểm đại dương ở những hành tinh xa xôi mà không cần đến nhà du hành. Mặc dù vậy, trong ngắn và trung hạn, nhóm của Camilli vẫn sẽ phát triển một giao diện ngôn ngữ trực quan, giúp các nhà khoa học trực tiếp giao tiếp với ROV, cùng với một nền tảng kết nối cho phép nhiều ROV làm việc và trợ giúp nhau y như một hạm đội.
Nguồn: Khoa học & Phát triển





